Close 
Choose your language

Video tutorials
Here you can find step-by-step programming examples and tutorials for troubleshooting and repair tasks.
If you want to learn the essentials of programming a UR robot, check out the Free e-Learning section where you can find interactive e-learning for both e-Series and CB3 robots.
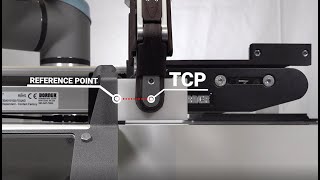
Tool Configuration: TCP, orientation, payload & center of gravity
This tutorial walks you through all the steps of configuring a tool/end-effector
 4m 33s
4m 33s


Learn to do machine tending with Universal Robots
Try our new machine tending module in the “e-Series Application Track” in “Online Training”. Here yo…
3m 05s

Improve and speed up your programming with constrained freedrive
From version 5.8 of Polyscope, it’s now possible to constrain rotation or movement in linear axes wh…
2m 40s

Prevent collision after program stop with a "Before Start Sequence"
Have you ever experienced your robot colliding with its surroundings when restarting it after a prog…
4m 59s
Measure object dimensions using only a gripper
Learn how you can program the robot to measure the dimensions of objects using only a gripper and a…
5m 57s
How to use the force sensor to detect objects
How to use the force sensor to detect objects (direction command/move until tool contact)
3m 54s
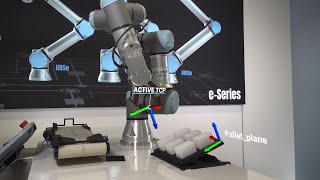
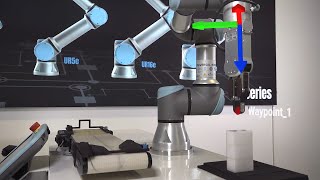
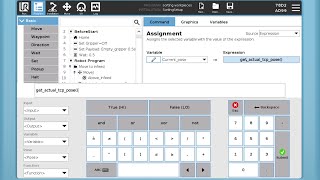
How to align the active TCP to a feature
In this video tutorial you will learn how to align the active TCP to a feature.
1m 44s
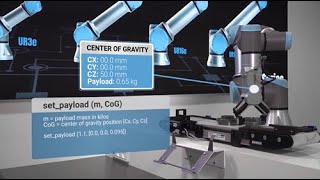
CB3: How to change payload and center of gravity during program execution
In this video tutorial you will learn how to change payload and center of gravity during program exe…
2m 42s

Safety: restricting tool direction angle
Learn how to make your application safer by restricting the angle in which the end-of-arm tool is al…
3m 44s

Safety: setting joint limits & speed
Learn how to restrict the movement range & speed for each individual robot joint
2m 47s

Safety: create and configure safety planes
Learn how to create and configure safety planes. The planes can prevent the robot from moving beyond…
2m 00s

Troubleshooting with support log reader
How to download and use the support log reader to troubleshoot using log files.
1m 51s

Update Polyscope software (CB-Series)
A guide to updating software on Universal Robots CB-Series
2m 20s

Create a backup log file (e-Series)
In this video tutorial you will learn how to create a back up log file for Universal Robots e-Series…
1m 10s

CB-series: Replacing a joint
Step-by-step instructions on how to replace a CB-series joint
6m 57s

CB-series: Changing a size 1 joint (UR5)
Step-by-step instructions on how to change a size 1 joint
4m 27s

e-Series: changing a size 3 joint (UR5, UR10 & UR16)
Step-by-step instructions on how to change an e-Series size 3 joint
6m 23s

e-Series: changing a size 2 joint
Step-by-step instructions on how to change a size 2 joint
4m 48s

e-Series: replacing safety control board
Step-by-step instructions on how to replace an e-Series safety control board
7m 40s

ActiNav 1/8: System
Set up communication between the Autonomous Motion Module and the e-Series controller
1m 46s

ActiNav 2/8: 3D sensor
Align the 3D Sensor to the robot using the alignment marker
6m 43s

ActiNav 3/8: Tool
Import the end-of-arm tool, set tool parameters and create clearance shapes
6m 49s

ActiNav 4/8: Environment
Create clearance shapes in the environment using teach or specify
6m 12s

ActiNav 5/8: Bin
Train bin walls and set bin parameters
9m 19s
ActiNav 6/8: Part
Import CAD model, create clearance shapes and set matching parameters
9m 53s

ActiNav 7/8: Pick Training
Create a pick rule
8m 17s

ActiNav 8/8: Place Training
Create a place rule
6m 51s
1 Introduction to URScript
Get an introduction to where you have already used URScript. Where to find most common functions, an…
7m 45s